Eleanor Jack Gibson est une psychologue américaine professeur de psychologie, qui s'est intéressée à l'apprentissage de la lecture et de perception de l'apprentissage chez les nourrissons et les tout-petits.
Dans la pratique, l'embodiment est utilisé pour penser des aspects généralement associés à notre vie quotidienne, tels que notre façon de bouger, de parler et de se développer. Ce processus d’embodiment se constitue de deux modes de fonctionnement.
Le premier mode, " bottom-up ", explique la manière dont les informations provenant du corps influencent notre cognition, i.e. des processus utilisent les informations provenant des organes sensoriels et analysent l’environnement seulement sur la base de ces informations
le second, nommé " top-down ", correspond à la manière dont notre cognition va influencer nos mouvements corporels, i.e. des processus utilisent des connaissances concernant la structure de l’environnement et qui influencent la perception.
Certaines théories de la perception visuelle soulignent une composante plus que l’autre et opposent les théories directes aux théories indirectes (constructivistes)
Les postulats de la perception indirecte sont les suivants.
La reconnaissance des formes est un processus actif et constructif.
La reconnaissance des formes n'est pas fournie directement par un stimulus, mais en est le résultat final, i.e. interaction entre le stimulus et les hypothèses que l'on y projette.
La reconnaissance des objets est influencée par la motivation : l'influence de nos désirs et de nos croyances sur la reconnaissance des formes qui peut aboutir à des erreurs ou des illusions ( Illusions d'optique).
Cette théorie postule donc que la perception des objets dépend fortement des processus mentaux descendants (top-down).
Perception directe
1. L'approche directe des Gibson est un peu différente.
En effet, toutes les informations nécessaires à la perception sont présentes dans l’environnement.
La perception est déterminée par les déplacements de l’observateur (perception de la profondeur), agent qui en perçoit les affordances.
2. L'approche écologique de l'apprentissage perceptif vise à expliquer comment les organismes qui perçoivent tirent parti des informations spécifiques et redondantes disponibles dans les réseaux d'énergie ambiante.
Ils doivent s'engager dans un processus d'harmonisation, pour apprendre à détecter des informations spécifiques sur les affordances.
Ils doivent ajuster leur comportement à une variable d'information, i.e. procéder à un processus d'étalonnage.
Elle consiste en une plate-forme piétonnière ou rampable qui comprend une falaise réelle recouverte d'une surface transparente, qui protège les participants contre les chutes, mais qui conserve les informations visuelles sur la falaise. Elle a été testé sur des animaux ( période de transition chez le chien), puis sur des nourrissons rampants (visual cliff).
Les nourrissons adoptaient un comportement circulaire dans lequel l'amélioration de l'exploration produisait de meilleures estimations de l'inclinaison de la pente et, inversement, une meilleure estimation produisait des améliorations du comportement de l'exploration.
En outre, les nourrissons doivent apprendre de nouvelles coordinations lors de la transition de la marche à quatre pattes à la marche bipède (Learning to Crawl 1998).
Apprentissage direct
1. L'un des derniers développements de l'apprentissage perceptuel est la théorie de l'apprentissage direct (Direct Learning 2007). Cette théorie définit une tâche perceptuelle dans un espace informationnel.
Dans un tel espace, chaque point représente une variable d'information et les trajectoires d'un point à l'autre représentent le processus d'apprentissage. L'innovation de cette approche réside dans l'appareil mathématique qui permet d'observer le caractère direct de l'apprentissage représenté par un chemin dans l'espace informationnel.
Simulateur de vol de la NASA
Ce chemin est contraint par le champ vectoriel qui représente les écarts entre les jugements (actions) et les retours (résultats).
En d'autres termes, l'apprentissage dépend des informations convergentes qui poussent (directement) l'agent à passer d'invariants non spécifiques à des invariants (plus) spécifiques, ce qui explique l'amélioration des performances.
2. Cette approche a été appliquée avec succès pour décrire :
1. Lee a également travaillé sur une définition mathématique d'un invariant perceptuel capable d'expliquer comment un conducteur peut contrôler visuellement son freinage afin d'éviter une collision. Il a pris l'exemple d'une voiture suivant un autre véhicule qui freine soudainement.
La distance et la vitesse ne sont pas nécessaires pour contrôler le freinage et juger de la possibilité de collision.
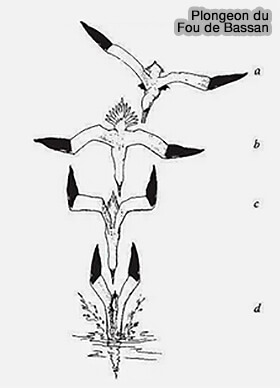
La surveillance de l'expansion de l'angle visuel de l'objet dans la direction du mouvement est plutôt suffisamment informative pour aider un conducteur à contrôler son action. Grâce à la détection de ce taux d'expansion, une voiture qui suit un autre véhicule peut éviter une collision grâce à la spécification du " temps restant avant le contact à la vitesse actuelle ".
3. Bien que l'indice tau d'origine ait été remisé par des travaux ultérieurs, la théorie de Tau est l'un des exemples les plus connus dérivés de résultats expérimentaux dans le cadre écologique qui a donné lieu à une approche entièrement nouvelle de l'étude du contrôle des tâches de locomotion et d'interception à partir d'une explication non représentatives (General Tau Theory: evolution to date. 2009) :
Le sport est l'un des domaines connexes de la recherche appliquée qui a été grandement influencé par les concepts et le cadre de recherche de la psychologie écologique.







 Processus cognitifs et traitement de l'information).
Processus cognitifs et traitement de l'information). 

 visual cliff).
visual cliff).